Implementing a Quadtree in Python
Sat Oct 10 2020
This blog post is the first part of a multi-post series on using quadtrees in Python. This post goes over quadtrees’ basics and how you can implement a basic point quadtree in Python. Future posts aim to apply quadtrees in image segmentation and analysis.
A quadtree is a data structure where each node has exactly four children. This property makes it particularly suitable for spatial searching. Quadtrees are generalized as “k-d/k-dimensional” trees when you have more than 4 divisions at each node. In a point-quadtree, leaf nodes are a single unit of spatial information. A quadtree is constructed by continuously dividing each node until each leaf node only has a single node inside of it. However, this partitioning can be modified so that each leaf node contains no more than K elements or that each cell can be at a maximum X large. This stopping criterion is similar to that of the stopping criteria when creating a decision tree.
Although usually used in two-dimensions, quadtrees can be expanded to an arbitrary amount of dimensions. The lovely property of quadtrees is that it is a “dimensional reduction” algorithm. Rather than operating in O(n^2) for a traditional linear search in two dimensions, a quadtree can accomplish close to O(log n) time for most operations.
1 Implementing a Point Quadtree
To implement a quadtree, we only need a few pieces. First, we need some way to represent our spatial information. In this application, we are only using points; however, we may choose to associate data with each point for an application.
class Point():
def __init__(self, x, y):
self.x = x
self.y = yThe second thing that we need is a tree data structure. Like all tree nodes, it has children; however, what is unique about a quadtree is that each node represents a geometric region. This geometric region has a shape represented by a location and a width and height. Additionally, if this is a leaf node, we need to have our node store the region’s points.
class Node():
def __init__(self, x0, y0, w, h, points):
self.x0 = x0
self.y0 = y0
self.width = w
self.height = h
self.points = points
self.children = []
def get_width(self):
return self.width
def get_height(self):
return self.height
def get_points(self):
return self.pointsTo generate the quadtree, we will be taking a top-down approach where we recursively divide the node into four regions until a certain threshold has been satisfied. In this case, we are stopping division when each node contains less than k nodes.
def recursive_subdivide(node, k):
if len(node.points)<=k:
return
w_ = float(node.width/2)
h_ = float(node.height/2)
p = contains(node.x0, node.y0, w_, h_, node.points)
x1 = Node(node.x0, node.y0, w_, h_, p)
recursive_subdivide(x1, k)
p = contains(node.x0, node.y0+h_, w_, h_, node.points)
x2 = Node(node.x0, node.y0+h_, w_, h_, p)
recursive_subdivide(x2, k)
p = contains(node.x0+w_, node.y0, w_, h_, node.points)
x3 = Node(node.x0 + w_, node.y0, w_, h_, p)
recursive_subdivide(x3, k)
p = contains(node.x0+w_, node.y0+h_, w_, h_, node.points)
x4 = Node(node.x0+w_, node.y0+h_, w_, h_, p)
recursive_subdivide(x4, k)
node.children = [x1, x2, x3, x4]
def contains(x, y, w, h, points):
pts = []
for point in points:
if point.x >= x and point.x <= x+w and point.y>=y and point.y<=y+h:
pts.append(point)
return pts
def find_children(node):
if not node.children:
return [node]
else:
children = []
for child in node.children:
children += (find_children(child))
return childrenThe QTree class is used to tie together all the data associated with creating a quadtree. This class is also used to generate dummy data and graph it using matplotlib.
import random
import matplotlib.pyplot as plt # plotting libraries
import matplotlib.patches as patches
class QTree():
def __init__(self, k, n):
self.threshold = k
self.points = [Point(random.uniform(0, 10), random.uniform(0, 10)) for x in range(n)]
self.root = Node(0, 0, 10, 10, self.points)
def add_point(self, x, y):
self.points.append(Point(x, y))
def get_points(self):
return self.points
def subdivide(self):
recursive_subdivide(self.root, self.threshold)
def graph(self):
fig = plt.figure(figsize=(12, 8))
plt.title("Quadtree")
c = find_children(self.root)
print("Number of segments: %d" %len(c))
areas = set()
for el in c:
areas.add(el.width*el.height)
print("Minimum segment area: %.3f units" %min(areas))
for n in c:
plt.gcf().gca().add_patch(patches.Rectangle((n.x0, n.y0), n.width, n.height, fill=False))
x = [point.x for point in self.points]
y = [point.y for point in self.points]
plt.plot(x, y, 'ro') # plots the points as red dots
plt.show()
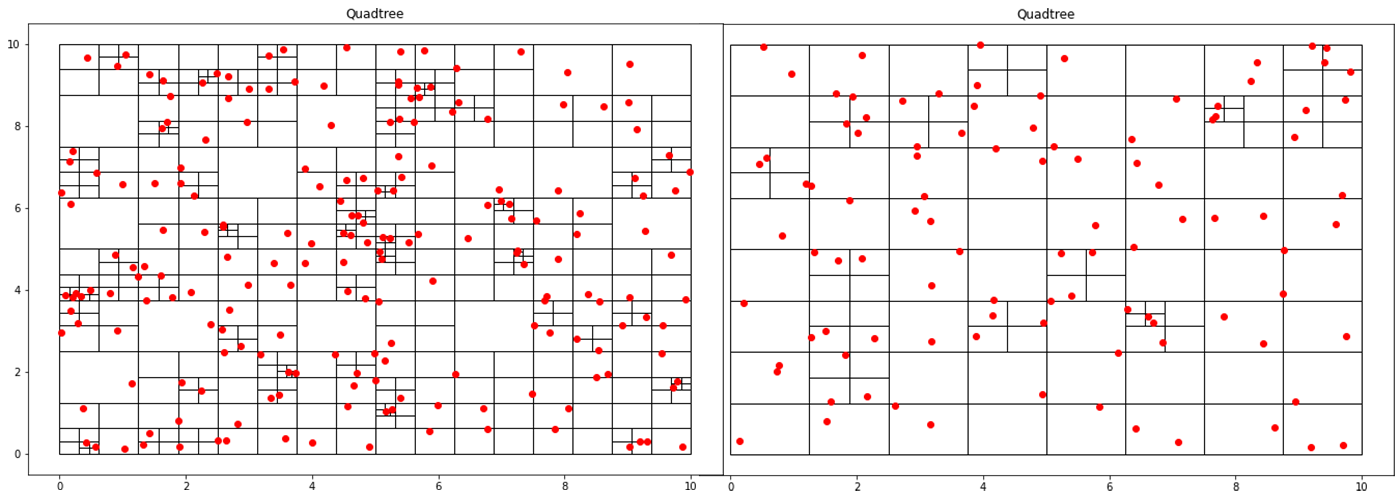
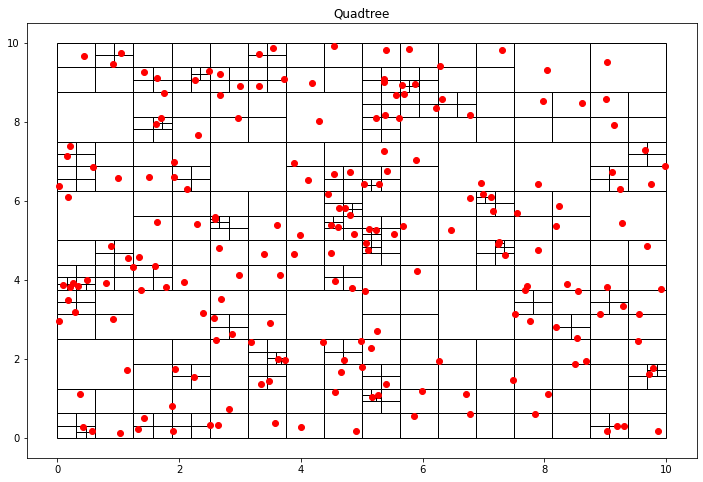
returnCreating a quadtree where each cell can only contain at the most section will produce a lot of cells.
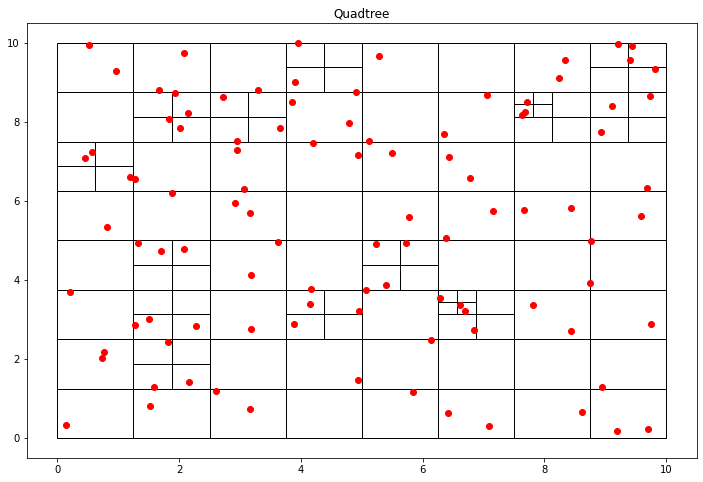
If we change the hyperparameter to split until there are at most two objects per cell, we get larger cells.
2 Future Work
In the future, I plan on making a post on how you can use quadtrees to do image compression.
Recent Posts
Server Monitoring and Restart Using a Raspberry PiMy Wall Mounted Raspberry Pi Homelab
The Data Spotify Collected On Me Over Ten Years
Visualizing Fitbit GPS Data
Running a Minecraft Server With Docker
DIY Video Hosting Server
Running Scala Code in Docker
Quadtree Animations with Matplotlib
2020 in Review
Segmenting Images With Quadtrees